Описание, назначение и работа машины

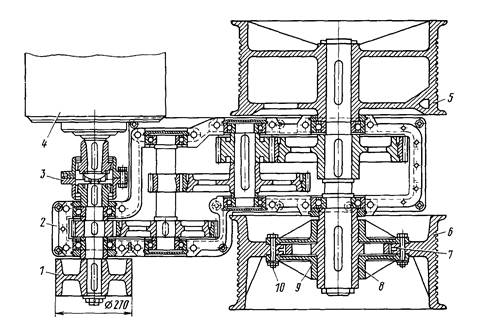
Рис. 2.1.6 Тяговая лебедка. УК.25/9-18
Кинематическая схема запасовки каната (рис. 2.1.7.) служит для передвижения грузовых тележек вдоль фермы крана из одного крайнего положения в другое, что позволяет выносить звено с платформы с укладкой его в путь или собирать старогодные звенья с укладкой их на платформу крана.
Тяговая лебедка, как и грузовая, смонтирована на собственной раме, прикрепленной болтами в средней части фермы крана. Обе лебедки расположены таким образом, что пульт управления ими расположен между ними. Лебедками управляет кранооператор с верхнего поста управления.
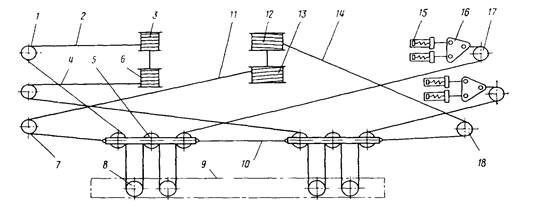
Рис. 2.1.7. Кинематическая схема запасовки каната
Схема запаковки тяговых канатов приведена на рис. (2.1.6.) Кинематически тяговая лебедка состоит из тех же узлов, что и грузовая, т. е. электродвигателя 4 типа Д-41 Мощностью 24 кВт при частоте вращения 970 об/мин, зубчатой муфты 3, трехступенчатого цилиндрического редуктора 2 с передаточным числом i = 25,2, двухколодочного нормально замкнутого грузового тормоза 1 с электромагнитным выключением и двух барабанов 5 и 6 с канавками. В отличие от грузовой лебедки оба барабана имеют одинаковый диаметр, равный 700 мм. Однако конструкция обоих барабанов различная: барабан 5 выполнен цельнолитым и крепится на ведомом валу лебедки на шпонке; барабан 6 сборный. В качестве ступицы барабана использовано храповое колесо 8, закрепленное на том же валу шпонкой. В теле диска барабана 6 с внутренней стороны сделаны шесть пазов под собачки 7 храпового устройства. Последние пружинами постоянно прижаты к зубьям храпового колеса. С обеих сторон храповой механизм ограничен двумя дисками 9, соединенными болтами с барабаном 6.
Наличие храпового устройства внутри барабана необходимо для натяжения тягового каната при его удлинении.
Перемещение грузовых тележек вдоль фермы осуществляется тяговой лебедкой с барабанами 12 и 13 (см. рис. 2.1.6.) посредством трех тяговых канатов 10, 11 и 14, два из которых огибают концевые блоки 7 и 18 фермы. Концы канатов 11 и 14 закрепляются на барабанах с различных сторон, поэтому при вращении вала барабанов один конец каната свивается с барабана, а другой навивается.
Грузовая тележка (рис. 2.1.8.) несет неподвижные блоки грузового полиспаста, поддерживающего траверсу со звеном. Рама тележки состоит из двух сварных боковин 1, соединенных болтами с распорными втулками. В средней части тележки на осях 5 на подшипниках попарно посажены блоки б. По концам рамы с обеих ее сторон на осях 3 укреплены балансиры 2 с безребордными опорными катками 4, которыми тележка передвигается по нижним полкам главной балки фермы. Для лучшего направления тележки вдоль балки с обеих сторон боковин укреплены кронштейны 8, в которых на осях укреплены безребордные ролики 9. для разведения балок канатных поддержек в стороны для прохода через них в нижней части боковин тележки приварены направляющие лыжи 7, а для воздействия на конечные выключатели ограничителей хода тележки верхние части боковин снабжены планками, сужающимися по концам. Тяговые канаты коушами 10 крепятся на втулках крайних болтов, скрепляющих боковины.
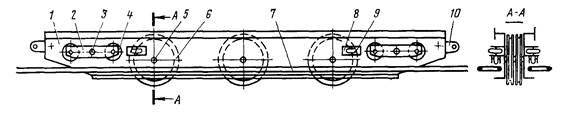
Рис. 2.1.8 Грузовая тележка
Траверса (рис. 2.1.9.) для крана служит грузозахватным устройством. Она представляет собой коробчатую балку 2, по концам которой шарнирно закреплены две поперечные полуавтоматические траверсы 1 и 5 с клещевыми захватами, а для подвешивания к ферме крана — подвижные блоки 3 грузового полиспаста, свободно посаженные на осях 4. Траверсы обеспечивают полуавтоматический захват головок рельсов типов Р50, Р65 и Р75. Конструкцию и работу траверс можно проследить по рис. (2.1.9. б, в). Внутри коробчатой балки 1 расположены две пары челюстей 2 для захвата головок рельсов звена, два стопора 8 с коленчатыми рычагами 9 и противовесами 10, рукоятка 15 для ручного освобождения стопоров, рукоятка 14 с тягой 12 для выключения замковых рычагов 6, стержни 5, соединенные с челюстями и толкателем 3, опирающиеся на головки рельсов. Для управления двумя стопорами от одной рукоятки предусмотрена рычажная передача, имеющая три канатика 11 и двуплечий рычаг 13. За счет пружины 7 замковые рычаги 6 постоянно прижаты к большему или меньшему диаметру стержней 5. При опускании траверс на звено за счет веса грузозахватного устройства челюсти траверс разводятся в разные стороны, рукоятка 15 запирается в крайнее правое положение, при этом оба стопора 8 устанавливаются в выключенное положение. При поднятии траверс грузовыми канатами челюсти надежно захватывают головки рельсов звена. Для раскрытия челюстей и снятия траверс со звена его опускают до соприкосновения с балластом или звеном, рукоятки 14 перемещают вправо, а затем отпускают, рукоятку 15 перемещают влево. Тогда за счет противовесов 10 стопоры 8 выдвигаются в наружные стороны и удерживают челюсти от закрывания при последующем поднятии траверс.