Техническое задание на разработку алгоритма ручного управления продольным движением самолета

Требуется разработать алгоритм ручного управления продольным движением самолета для одного из режимов полета в соответствии с заданным номером варианта. Исходные данные для проектирования представлены в таблице 1.
Требования к статическим характеристикам
Расход штурвала летчика на единицу перегрузки должен быть не менее 40 мм и не более 60 мм.
Требования к динамическим характеристикам
При ступенчатом отклонении штурвала время регулирования по нормальной перегрузке не должно превышать 1,5 сек. при величине перерегулирования не более 10%. Переходный процесс по угловой скорости тангажа по времени регулирования не нормируется, но перерегулирование при ступенчатом отклонении штурвала не должно превышать 100%.
Требования к разбросам параметров
Динамические и статические характеристики системы управления должны удовлетворять сформулированным выше требованиям при неопределенности эффективности стабилизатора ![]() в пределах ±20%.
в пределах ±20%.
Дополнительные требования
Допускаются автоколебания по перегрузке с амплитудой не более 0,02.
Целью работы является расчет алгоритма управления продольным движением самолета, обеспечивающего выполнение требований к характеристикам системы управления, сформулированным в техническом задании. Функциональная схема проектируемой системы представлена на рис. 8.
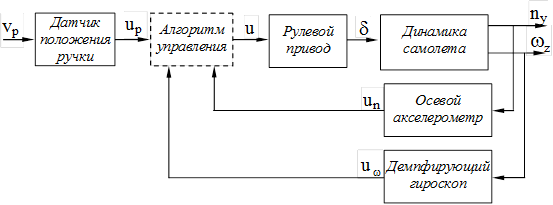
Рис. 8. Функциональная схема проектируемой системы управления.
В качестве инструмента расчётов рекомендуется использовать пакет MATLAB [6], [7]. Предлагается следующий план выполнения работы.
1.1.1. Записать полную систему дифференциальных уравнений неизменяемой части системы с учётом динамики датчика угловых ускорений и акселерометра. Записать упрощенную полную систему дифференциальных уравнений неизменяемой части системы (разомкнутой системы) без учёта нелинейностей рулевого привода. Рассчитать собственные числа разомкнутой системы и установить принадлежность соответствующих собственных чисел собственно самолёту, рулевому приводу, каждому из датчиков.
1.1.2. Рассчитать передаточные функции разомкнутой системы от управления u на входе привода до угла атаки ![]() , а также до сигналов перегрузки
, а также до сигналов перегрузки ![]() , и угловой скорости тангажа
, и угловой скорости тангажа ![]() . Определить полюсы и нули всех передаточных функций.
. Определить полюсы и нули всех передаточных функций.
1.1.3. Рассчитать логарифмические частотные характеристики, соответствующие п. 3.1.2 с учётом и без учёта динамики датчиков и рулевого привода.
1.1.4. Построить переходные характеристики, соответствующие п. 3.1.3, выбирая величину входного ступенчатого воздействия на входе привода такой, чтобы в установившемся режиме ny уст.=1 Оценить временные характеристики (перерегулирование, время регулирования, время нарастания). Провести сопоставительный анализ результатов выполнения п.п. 3.1.1 – 3.1.4.
1.1.5. Выбрать расчетную модель объекта управления, проводя, если это возможно, упрощения динамики самолета с приводами и датчиками. Выбрать желаемые собственные значения матриц динамики замкнутой непрерывной системы, учитывая заданные требования к временным характеристикам и необходимость использования по возможности небольших величин коэффициентов обратных связей.