Математическая модель привода стабилизатора

Схема электрогидравлического привода руля высоты представлена на рис. 2. Привод представляет собой следящую систему, входной величиной которой является электрический управляющий сигнал, а выходной – перемещение рабочего органа, связанного со стабилизатором (рулём высоты).
На сравнивающее устройство 2 подаются управляющий сигнал 1 и сигнал обратной связи 3, полученный с датчика обратной связи 16. Сигнал рассогласования 4 подаётся на вход электромеханического преобразователя 5. Собственно гидравлический усилитель, составляющий основу привода, является двухкаскадным. Питание первого каскада усиления осуществляется через редуктор 6. Заслонка 7, укрытая защитным колпачком 8, жёстко связана с якорем электромеханического преобразователя. При перемещении заслонки изменяются гидравлические сопротивления сопел 9, через которые непрерывно течёт рабочая жидкость под воздействием небольшого управляющего давления Pу. Переменные сопротивления сопел и постоянные гидравлические сопротивления дросселей 10 образуют гидравлический мост, диагональ которого составляет нагрузка – золотник 11. Поэтому при отклонении заслонки от среднего положения в областях А
и Б
золотника 11 образуется перепад давлений, создающий движущую силу. Пружины 12 выполняют роль жёсткой механической отрицательной обратной связи. Поршни золотника при постоянном положении заслонки 7 будут перемещаться до тех пор, пока сила пружины не уравновесит движущую силу. Таким образом, перемещение штока золотника пропорционально сигналу рассогласования 4. Смещение штока золотника совместно с закреплёнными на нём поршеньками приоткрывает соответствующий канал для передачи давления источника рабочей жидкости Рб на соответствующую сторону поршня силового цилиндра 13. Стрелками на рисунке показана подача рабочей жидкости высокого давления. В результате шток 14 силового цилиндра перемещается и через кинематическую передачу поворачивает руль высоты 15.
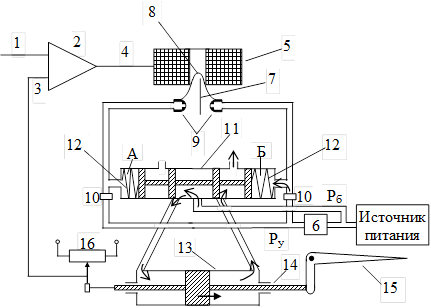
Рис. 2. Схема привода
Структурная схема электрогидравлического привода представлена на рис. 3.
Для пояснения способа получения структурной схемы обратимся к рис. 4, на котором изображено простейшее гидравлическое устройство. В камеру гидравлического устройства поступает жидкость, расход которой регулируется клапаном. (Под расходом жидкости понимается изменение её объема в единицу времени).
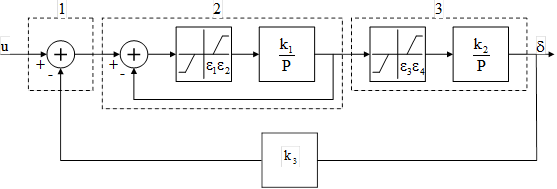
Рис. 3. Структурная схема электрогидравлического привода.
На рис. 3 приняты следующие обозначения: 1 – сравнивающее устройство; 2 – золотник; 3 – силовой механизм.
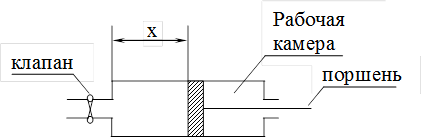
Рис. 4. Гидравлическое устройство
Если полагать, что расход жидкости пропорционален перемещению клапана r, то изменение объема жидкости в рабочей камере также пропорционально величине r. Поэтому скорость перемещения поршня пропорциональна величине r, т.е.
![]() , (24)
, (24)
где k – коэффициент пропорциональности.
Передаточная функция от величины r к x равна, очевидно, ![]() .
.