Классификация роторных экскаваторов

§ вскрышные роторные экскаваторы
§ добычные роторные экскаваторы
Роторный траншейный экскаватор — землеройная машина с рабочим органом в виде ковшового колеса (ротора), вращающегося в плоскости, совпадающей с направлением рабочего перемещения всей машины или незначительно отклоняющейся от нее. Грунт, отделяемый от массива и захватываемый ковшами, поднимается в зону разгрузки, которая находится в верхней части ротора, перемещается в сторону от траншеи и укладывается в отвал ленточным конвейером или метателем.
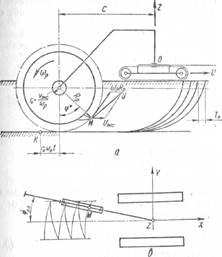
По сравнению с цепными роторные траншейные экскаваторы отличаются более высоким КПД (нет цепей, работающих в абразивной среде) и, следовательно, меньшей энергоемкостью разработки грунта. При равной с цепным экскаватором массе роторный экскаватор производительнее, поскольку допускает более высокую скорость резания, обусловленную равномерностью вращения ротора, жестким креплением ковшей и лучшими условиями их опорожнения. Однако роторным рабочим органом можно отрывать траншеи не уже 0,15 .0,2 м, тогда как цепным ширина траншеи (щели) может быть доведена до 0,05 м. Пределы глубины отрываемых траншей роторными экскаваторами несколько меньше, чем цепными.
Глубина отрываемых траншей определяется диаметром ротора. Увеличение глубины копания связано со значительным возрастанием диаметра и массы ротора и поэтому рациональный предел глубины копания для ЭТР не превышает 3 м. Передача энергии от дизеля тягача к основным исполнительным механизмам (роторному колесу, отвальному конвейеру, гусеничному движителю) и вспомогательному оборудованию (механизмам подъема рабочего органа и конвейера) осуществляется с помощью механической, гидравлической или электромеханической трансмиссии.
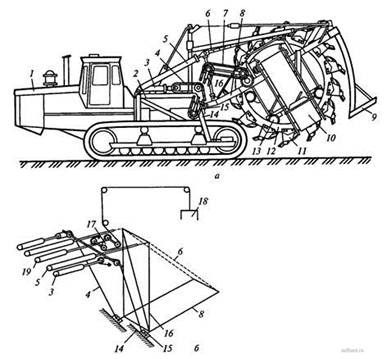
В трансмиссию тягача включен гидромеханический ходоуменьшитель для бесступенчатого регулирования рабочих скоростей движения машины при копании траншей. На тягаче установлена дополнительная рама 2 с размещенными на ней механизмами привода 7и подъема-опускания рабочего органа. Рама имеет две наклонные направляющие 14, по которым с помощью пары гидроцилиндров 3 и двух пластинчатых цепей 4 гидравлического подъемного механизма перемещаются ползуны 15 переднего конца рамы 8 рабочего органа при переводе его из транспортного положения в рабочее и наоборот. Подъем-опускание задней части рабочего органа (рис. 1, б) осуществляются парой гидроцилиндров 5, штоки которых шарнирно прикреплены к верхней части стоек 16, связанных с задним концом рамы 8 цепями 6. При копании траншеи задняя часть рабочего органа находится в подвешенном состоянии Установка откидной части ленточного конвейера в наклонное рабочее положение и опускание ее при транспортировке машины производятся гидроцилиндром 19 через полиспаст 17 с траверсой 18. Изменением угла наклона откидной части конвейера достигается различная дальность отброса грунта в сторону от траншеи.
Привод ходового устройства экскаватора при движении на рабочих скоростях осуществляется от гидромеханического ходоуменьшителя, включающего насос 8 переменной производительности, гидромотор 12 и понижающий редуктор. Гидрообъемный привод ходоуменьшителя выполнен по схеме гидронасос - гидромотор. Вращение от гидромотора через понижающие передачи раздаточного редуктора 7 передается сначала на средний, а затем на нижний валы, коробки передач 2 тягача, далее через коническую передачу 20, бортовые фрикционы 3 и бортовые редукторы 4 на ведущие звездочки 21 гусеничного движителя.